
An Integrated Sensor-Model Approach for Haptic Feedback of Flexible Endoscopic Robots
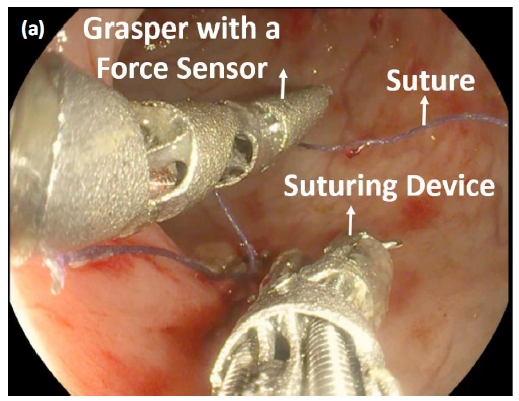
Haptic feedback for flexible endoscopic surgical robots is challenging due to space constraints for sensors and shape-dependent force hysteresis of tendon-sheath mechanisms (TSMs). This paper proposes (1) a single-axis fiber Bragg grating (FBG)-based force sensor for a TSM of a robotic arm and (2) an integrated sensor-model approach to estimate forces on other TSMs of that arm. With a robust and simple structure, a temperature-compensated sensor can be mounted on the distal sheath to measure forces applied by the TSM. This proposed sensor was integrated with a Ø4.2 mm articulated robotic arm driven by six TSMs, with a measurement error of 0.37 N in this work. The measurement from the single sensor was used to identify parameters in the force-transmission models of all other TSMs in the robot, realizing a one-sensor-for-all-distal-forces measurement method. The sensor-model approach could accurately estimate the distal force with an RMSE of 0.65 N. An animal study was carried out to demonstrate the sensor’s feasibility in real-life surgery. The sensor-model approach presented a robust, space-saving, and cost-effective solution for haptic feedback of endoscopic robots without any assumption on the shapes of the robot.
Related Pubulication:
Paper: Lai, Wenjie, et al. “An integrated sensor-model approach for haptic feedback of flexible endoscopic robots.” Annals of Biomedical Engineering 48 (2020): 342-356.
(c) Pheelab. All rights reserved.