
Smart Grow-and-Twine Gripper for Vegetable Harvesting in Vertical Farms
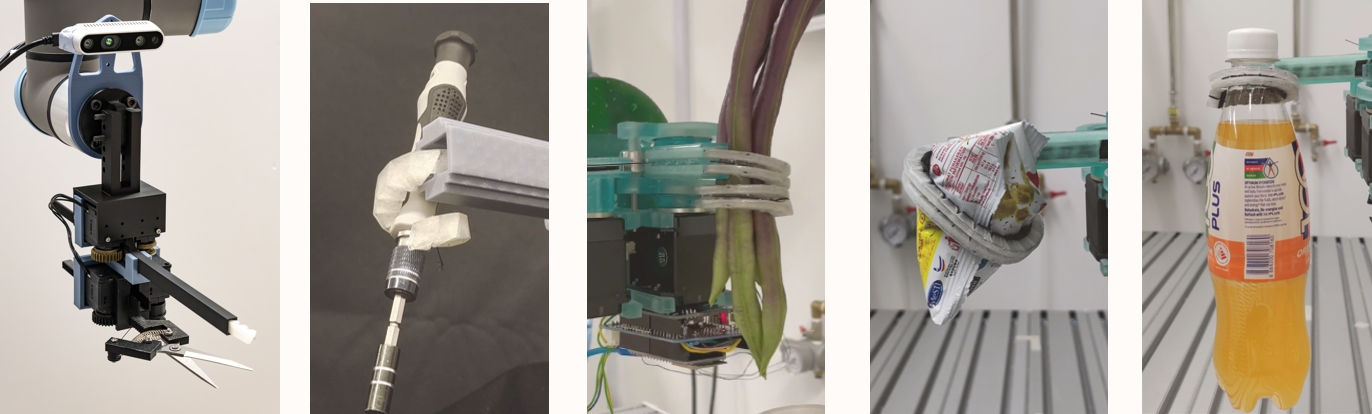
Vertical farming has emerged as a sustainable, efficient, and climate-resilient food production method, which can improve food security. In most commercial vertical farms, harvesting is carried out manually, which are labor-intensive and costly. Numerous robotic grippers solutions have been developed for harvesting. However, they have limitations like restricted adaptivity, excessive mechanical stress on target, and poor accessibility, hindering their adoption for harvesting. Here, we present a tendon-driven gripper equipped with a capacitance-based contact sensor array. The proposed gripper can grow and twine around the target vegetable and adjust the tightness of its grip based on number of contacts. The proposed gripper can generate 4 to 10 N pulling force on bok choy and can also grip various gourds, leafy and podded vegetables. This work paves the way for harvesting automation in vertical farms. Apart from agriculture field, the smart gripper can also be used to grasp objects with various size, shape and weight in warehouse, and food & beverage industry.
Related Pubulication:
Paper: Liu, jiajun, et al. “Smart Grow-and-Twine Gripper for Vegetable Harvesting in Vertical Farms” 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft). IEEE, 2024.
(c) Pheelab. All rights reserved.