Research
2024
2023
2022
2021
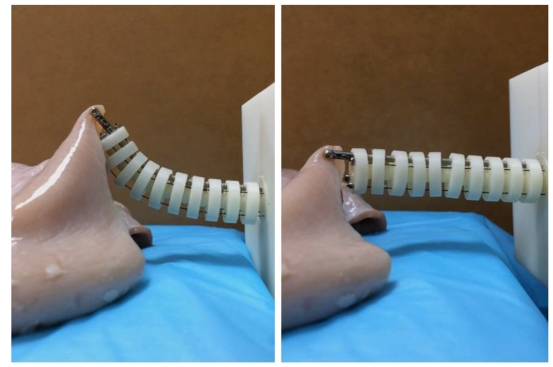
Friction Modeling of Flexible Surgical Tools
October 26, 2021
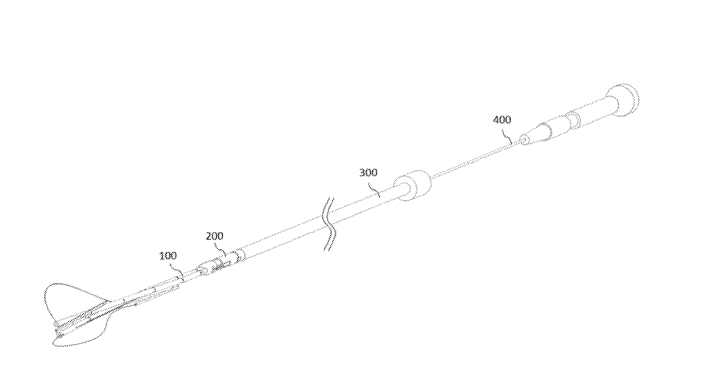
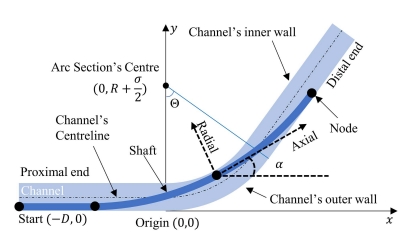
A Frictional Contact-Pattern-Based Model for Inserting a Flexible Shaft Into Curved Channels
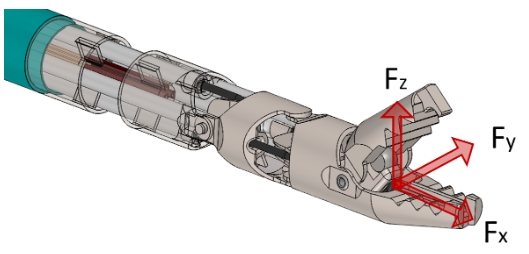
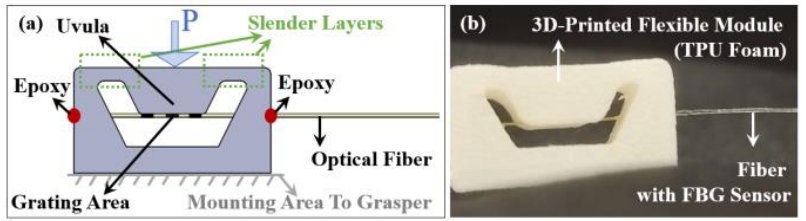
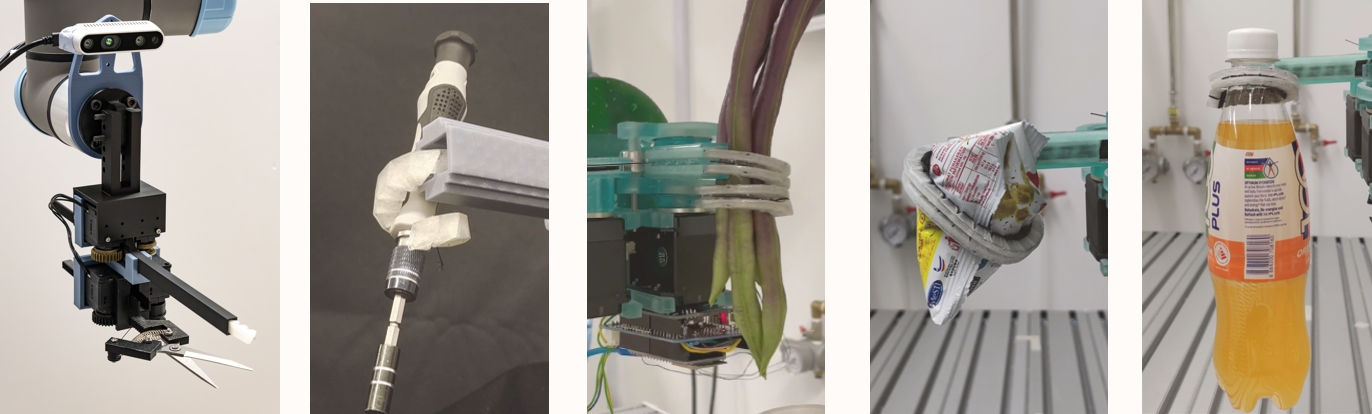
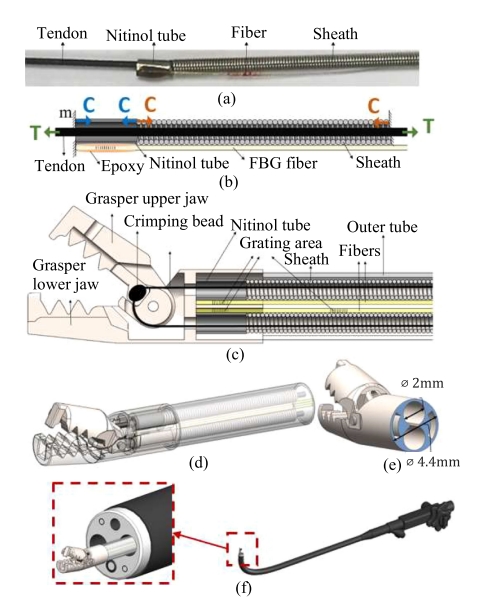
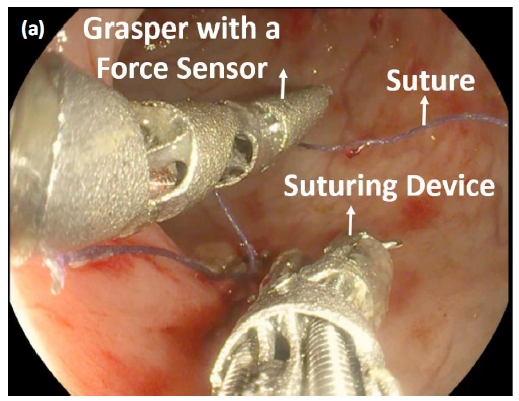
Robotic flexible endoscopic grasper with a three-axis force sensor
April 06, 2021
Force sensor integration with an articulated surgical gasper.
2020
2019
2018
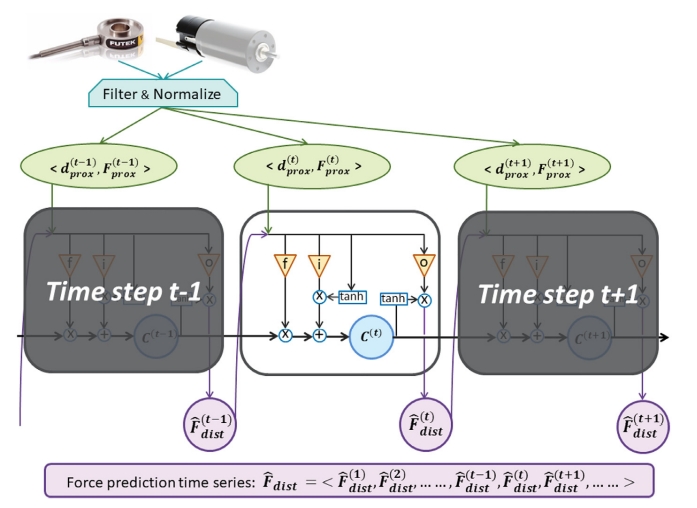
Deep learning for haptic force estimation
December 31, 2018
Distal-end force prediction of tendon-sheath mechanisms for flexible endoscopic surgical robots using deep learning